First steps in linear algebra for Quantum Computing explained (Expert resources)
Introduction
Understanding quantum computing can be daunting due to its reliance on complex mathematical concepts, particularly linear algebra. Many learners struggle with grasping these foundational principles, which hinders their ability to comprehend how quantum computing works. This challenge can be frustrating and discouraging, especially for those without access to advanced educational resources.
To address this issue, this first blog serves as a refresher on linear algebra, breaking down essential concepts such as vectors, vector notations, and vector operations. It also delves into matrix operations, including creation, addition, multiplication, transposition, and the use of Python for practical applications. By mastering these linear algebra concepts, readers will be better equipped to understand the mathematical underpinnings of quantum computing, making the learning process more accessible and less intimidating.
1. Vectors
According to Stone (2023), the space of quantum particles has four dimensions, and the particles have no size or form. Because this is difficult for us as humans to understand, we have to use math to comprehend what is going on. Many of these concepts do not reflect how things really work but describe them in a way that is understandable for us. We only observe three dimensions; the fourth dimension has no meaning to us and seems to overlap with one of the other dimensions. The three-dimensional space can be graphically shown as the Bloch Sphere, named after Felix Bloch (Stone, 2023).

Bloch Sphere rendered by Qiskit

three dimensional vector space
1.1 Vector notations
When noting a vector, we need to write two types of information: the scale and the direction. This can be noted as (vector = ax + by + cz ), where ( x, y, ) and ( z ) are the axes, and ( a, b, ) and ( c ) are the scalar coefficients. An example could be (-6x + 2y + 1z), where the vector is located at (-6) on the x-axis, (2) on the y-axis, and (1) on the z-axis. Because ( x, y, ) and ( z ) are always in the same vector space, they are redundant (Srinivasan, n.d.). Noting a vector as ({vector} = a + b + c ) holds the same information. Noting a vector in tuple notation is ( vector = [a, b, c] ) or (vector = (a, b, c)), and in matrix notation as (vector = a b c ) as one row and three columns (Srinivasan, n.d.). When a coefficient is (0), it is not noted in the tuple notation but is noted in the matrix notation (Srinivasan, n.d.). The vector notation can in several forms, in this blog, I use bold for the vector, which is common in print (Stone, 2023).
1.2 Vector Operations
Additions of vectors are done by adding up the coefficients. Example: (v1 = (7x + 2y + 3z)) and (v2 = (x - 5y + 4z)). We can't change magnitude or direction, so we add 7 + 1, because 0x is the same as 1x or just 1. Then we subtract 2 - 5 and 3 + 4. The result is (v3 = 8x -3y + 7z) (Srinivasan, n.d.).
Calculating the magnitude (the length of the vector) of a vector with two dimensions (x,y) is: ||m|| = sqrt(x^2 + y^2) (Stone, 2023) In this case (x) is 7 and (y) is 2, so sqrt(7^2+2^2) = sqrt(49+4=53). The square root of 53 is approximately 7,28, which is the magnitude of this vector. When a vector has three dimensions, susch as v1, you need to calculate ||m|| = sqrt(x^2 + y^2 + z^2), which is sqrt(49+4+9=62) and ||m|| is approximately 7,87, so the magnitude of v1 is approximately 7,87.
Scalar multiplication scales the magnitude of a vector up and down by a scale.
Example: The scalar is 5 and multiplies v1 (7, 2,3) by 5, which is 5v1. 5v1 is calculated by (5v1 = (5*7, 5*2, 5*3), or (5v1 = (35,10,15)). The vector has now a magnitude of times 5 and the direction remains the same (Srinivasan, n.d.).
Vector transposing turns a row vector into a column vector and vice versa. This is done to multiply vectors. Example: The picture below shows vector transposing. v1 (row vector) is transposed to v1.T (column vector) (Stone, 2023). The T should be in superscript, but because of restrictions of this blog platform, I used the .T notation.
Vector transposing is necessary when you multiply vectors manually. It is not necessary when a scripting tool like Python is used, which is described later on in this blog.
The dot product, or inner product is calculated by multiplying two vectors and adding up the numbers. The dot product is not a vector, but one scalar.
Example: (v1 = (7 + 2y + 3z)) and (v2 = (x - 5y + 4z)). The calculation is (7*1 + 2*-5 + 3*4), which is (7-10+12) and the dot product, or inner product, is 9 (Srinivasan, n.d.).
The cross product is the multiplication of two vectors and results in a new vector. This is only possible when in the matrix notation and the first matrix has the same number of columns as the second matrix has number of rows. In case the second vector has more or less rows than the first vector has columns, you can't calculate the cross product (Srinivasan, n.d.).
Example by Srinivasan (n.d.):
First we multiply 2 by 4 and 3 by -5, which is (2*4=8) and (3*-5 = -15). Then we subtract both numbers, which is (8--15), or (8+15 = 23). Then (7*4 - 3*1 = 25) and (7*-5 - 2*1 = -35 - 2 = -37).
The cross product = (23, 25,-37).
An orthogonal basis is a set of vectors that can be combined to represent any other vector in the vector space. These vectors are perpendicular to each other and, when normalized, have a length of one, forming an orthonormal basis (Stone, 2023). In quantum computing, the vectors ((1,0)) and ((0,1)) are important because they represent the base states for qubits, often denoted as (|0>) and (|1>). Any vector in the space can be represented as a linear combination of these orthogonal basis vectors (Stone 2023).
Example: the vector (7,2) can be expressed as (7 * (1,0) + 2 * (0,1) = (7,2)).
2 Matrix Operations with Python
Linear algebra is best used with matrices and is supported by python very well.
A matrix can hold all kinds of information and there is no limit to how many items it can hold. A matrix has rows and columns, but could also be just one row (a row matrix) or one column (column matrix). Matrices can be added and multiplied using the same methodology as just described. A matrix with 3 rows and 5 columns is called a 3 by 5 matrix (Srinivasan, n.d.).
For this course, I used Jupyter Lab (https://jupyter.org/try-jupyter/lab/) to work with Python, because it's straight forward and nothing has to be installed.
2.1 Creating a new matrix
Creating a matrix with python can be done in various ways. Some are shown below in examples by Srinivasan (n.d.):





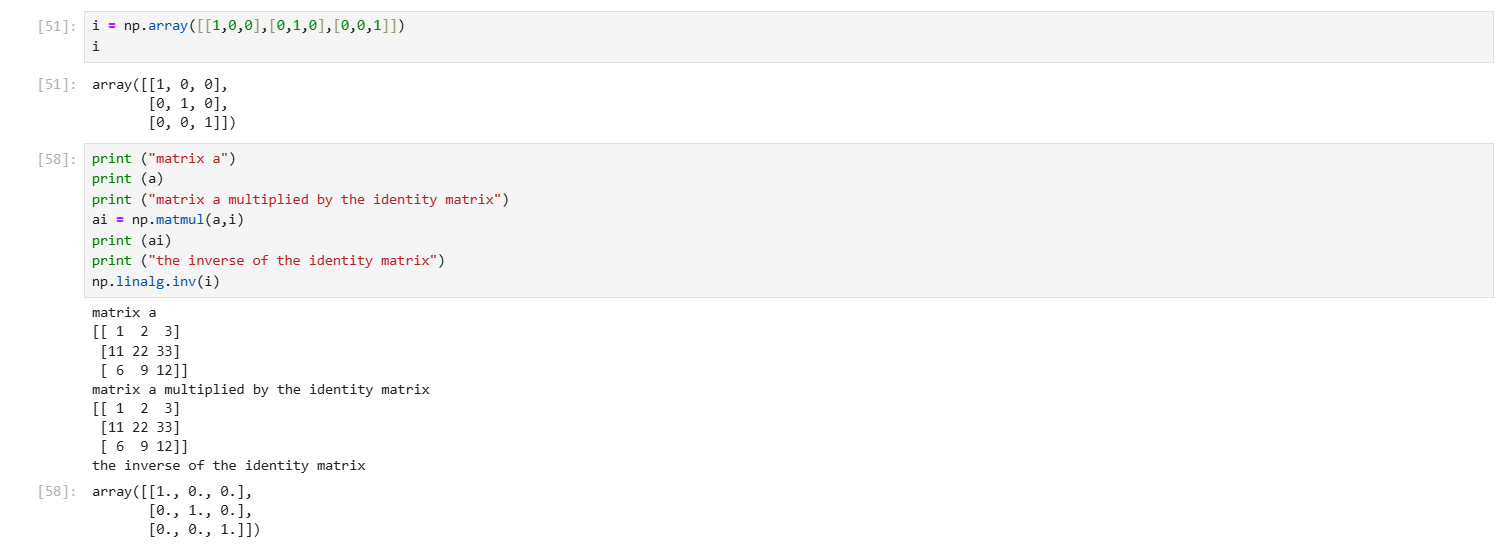
Matrix (i) is created and displayed below matrix (g). The vertical is filled with (1) and the other cells are filled with (0). Matrix (i) is an identity matrix.

A zero matrix is a matrix filled with zeros. A zero matrix can have any size, but note that a zero matrix with a different size are unequal to each other. For example, A 2x2 zero matrix is a different matrix than an 1x2 matrix (Srinivasan, n.d.).

There is an easier way to find the inverse of a matrix, shown below.

In case a matrix doesn't have an inverse, you'll get an error. Not every matrix has an inverse.

You can see the two matrices (h and j) and the result of multiply (h,j). The result is the same as when you use (h*j). I favor multiply, because it is more clear what we are actually doing and what is the result is going to be.
3. Conclusion
Sources
Microsoft (n.d.). https://quantum.microsoft.com/en-us/insights/education/concepts/quantum-math#:~:text=The%20use%20of%20complex%20numbers,key%20features%20of%20quantum%20mechanics.
Srinivasan (n.d.). https://www.percipio.com/courses/23da95d4-b1e2-46c7-a189-c9437f33de5c/videos/88dddff0-134b-4237-879c-1e59b7b4c495
Stone, O. C. (2023, 17 april). Learn quantum computing - Quantum Computing Fundamentals [Video]. LinkedIn. https://www.linkedin.com/learning/quantum-computing-fundamentals/learn-quantum-computing?contextUrn=urn%3Ali%3AlearningCollection%3A7013770329806249984&u=46118444

Reacties
Een reactie posten